







 |
Project Roots
The project started, as many do, with discussions in a pub after a particularly hard sail. We were all glad to be ashore in one piece, and the conversation drifted round to what would happen if one of the crew fell overboard in those conditions. This in turn led on to what safety devices were available on the market, and their limitations. It became obvious that there was no ideal solution available, and so the conversation moved on to what would be the ideal. At this stage, the seed of the POB project was sown. What was needed was a device that knew where it was. A GNSS receiver fulfilled this requirement. It then had to transmit this information back to the boat. The boat had to be capable of receiving this information, and, also knowing where it was, calculate the range and bearing of the casualty from the boat. We then considered that we all carry emergency equipment, but rarely, if ever, use it. This means that when an emergency occurs and adrenaline is running, we have the added stress of quickly trying to learn new tasks. The obvious answer is to use equipment that we are all familiar with. It seemed obvious that the on board navigation system would fit the bill admirably. It occurred to Christine and Peter that they had all the skills necessary to develop this concept as a project. Peter had initially trained as an electronics engineer, Christine in Astrophysics, and they both had extensive experience in software development in GNSS techniques, a large variety of communications systems, and a large number of embedded system projects under their respective belts. The seed was sown. |
 |
Getting Started
Peter and Christine already had experience of starting a project from scratch. In the early 1990s they designed and developed a car navigation system using a GNSS receiver feeding into a laptop computer. The concept was a technical success, and at the time a cheaper alternative to the built-in units in luxury cars. Unfortunately, the project failed through lack of funding. They therefore decided not to start until some form of funding was in place. They looked at what was available, and found that there were government grants available for developing new concepts. With advice from John Ashton of Essex Business Link, they applied for and were granted a Smart Award. |
 |
Early Developments
They created a new company, Sci-Tech Systems Ltd., to focus on their joint venture. They used off-the-shelf modules to form an experimental system to carry out a feasibility study. From this phase, a number of technical problems were raised, and either solved at the time or noted for future development. The main problem encountered was the lack of suitable components to build the system at their target price. In particular, most of the GNSS receivers were bulky, power hungry, and the sensitive ones were very expensive. Having recognised that they could not successfully perform their technical design tasks and perform the myriad other tasks needed to create a successful project, they involved two other people: Roger Noble as Financial and Business consultant, and David Lewin as Sales and Marketing consultant. Using their contacts in the leisure marine market, David and Roger tried to involve large marine electronics companies in the project, but it was clear that the concept was ahead of the technology. For this reason the project was put on the back burner, and Peter and Christine devoted 50% of their time to working on revenue earning projects. In the meantime they carefully watched the market place and electronic developments. |
 |
The project takes off
In 2008 technology had moved on apace. There were now low power super-sensitive GNSS receivers coming onto the market, and the communications transceiver chips had been further developed. The time was right to move the project on to the next stage. As part of this phase Peter and Christine entered for the European Satellite Navigation Competition (which also included Taiwan and Australia, and now includes the Middle East). The UK part of the competition was organised by the Hertfordshire Business Incubation Centre, and the overall competition run by Anwendungszentrum GmbH Oberpfaffenhofen . To Peter and Christine's surprise, the POB concept won the UK and Ireland Regional prize, the GSA Special Topic Prize, and the overall Galileo Masters award, making them the first triple winners in the history of the competition. This gave them business support, office and laboratory space and funding to help with the development of a prototype. It also gave them a large amount of media coverage and altered their business profile permanently. It was around this time that the team was joined by Will Bentall of London Associates. Will specialises in product design. Sci-Tech (POB) Ltd. was formed to develop and commercialise the POB project. |
 |
The Prototype Electronics
Now based in the Business and Technology Centre at Stevenage, Peter and Christine's first priority was to create the electronics. After some research, they commissioned a Northamptonshire-based company to create a prototype board. As a parallel task, they set about developing the systems software in the laboratory. Will gave invaluable advice on integrating electronics into specialist cases, built the floating trials unit and produced presentations and illustrations. |
 |
Initial Tests
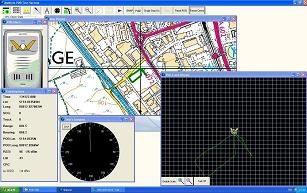
After some initial positional jitter problems we ran trials around Stevenage. The image shows the sort of results we were obtaining on land. |
 |
Galileo Application Days
In early March 2010 we were invited to display our system at the prestigious Galileo Applications Days, an event designed to promote the planned European GNSS system. It was held outside the EU Berlaymont building in the centre of Brussels and was very popular. In the run-up to the event we worked very hard to achieve a stable working system, with the result that our demonstrations were a great success. We appeared on French and Belgium television, had numerous radio interviews, and received tremendous publicity from the event. Our POB Gallery page has more pictures from this event. |
 |
More Trials
Will Bentall made our first waterproof test prototype that could float, enabling us to conduct tests and trials in the water, at locations along the East Coast. Once we started operating at higher transmission power, another set of problems surfaced. It was some time before these were all solved and we could run our high power trials and water tests. |
 |
First Range Trials
Eventually, we achieved a full sent of trials in, on and by water. The results were reasonable, but needed to be better. At low power we tracked along Maldon Promenade up to nearly 1km, the limiting factor being the end of the prom., not loss of signal. At around 100mW transmission we achieved multiple tracking to a range of 1.2 nautical miles. At 500mW in very poor conditions we tracked 'boat to boat' to a range of 2.2 nautical miles. However, during our development phase, the market had moved on, and the development of personal EPIRBs and personal AIS transmitters made it seem unlikely that our tracking system would succeed as a Man Overboard product. |
 |
Change of Course
During our development phase a succession of people approached us, asking us to develop our system for their particular requirement. The vast majority of these were divers, so we commissioned some independent market research to check the possibilities, and this confirmed that diving was an area where our system could be a useful aid. The requirement changed from an emergency-only system to one that was tracking all the time, with an alert function if a diver wishes to attract the attention of the cover boat. Many divers are concerned that their cover boat will not see or hear them when they surface. The addition of a local tracking system that has a good range, has no operating costs except recharging the batteries, and will aid the Dive Manager in locating divers once they surface, is highly desirable. |
 |
ESABIC Harwell
To develop this new phase of the project Peter and Christine, as Sci-Tech (POB) Ltd., moved into the newly-opened European Space Agency Business Incubation Centre (ESABIC) at Harwell in September 2011, and started re-evaluating the project. They tapped into the resources available to help solve the known technical problems, and used the ESA grant, together with their own money, to help develop a new system: a prototype, but very close to the final requirements for production. The requirements were that the system should be low cost, have a range of at least 10km, should be operational on battery power for at least 24 hours, and the diver units should be waterproof to 50m, and preferably 100m. |
 |
Survey
To ensure we produced a system that met diver requirements, we set up a survey on our web site, in early 2012. With the aid of the British Sub-Aqua Club (BSAC) who publicised it and gave a great deal of advice and help, we gathered and analysed the results. It was very interesting to find out how many divers who responded to the survey had been separated from their cover boat for periods of time varying from a few minutes to a number of hours. Not a pleasant experience. |
 |
Diver Unit Electronics
After some research, in mid-2012 Peter and Christine commssioned an electronics designer based in Wales to create the new board. He is a radio expert with experience of marine comms and GPS. To help with evaluating the prototype system, and to maintain as much flexibility as possible, they created a unit with extra functionality. As well as using 'state of the art' GNSS Receiver and Radio modules, they have designed it to also support: a basic diver UI, data logging, sensitivity to motion and direction, and an aid for wreck-finding. During late 2012-early 2013, Peter and Christine evaluated a number of proposals and commissioned a product designer (also based in Wales), to design the casing. It has been designed around divers' needs to be rugged, to withstand diver equipment being dropped on it, and to be waterproof to at least 50m. |
 |
Ship Unit Electronics
For the trials base unit that receives and displays diver information, it was decided to initially keep it separate from the boat navigation electronics, to be able to conduct tests anywhere, land or sea. To do this, a unit was enclosed in a rugged case, and waterproofed. It housed similar electronics to the Diver Unit, but in addition contained a larger built-in battery that could be recharged when connected to a 12V or 24V system. The display is 'daylight visible', and it is operated using set-in buttons. |
 |
Performance
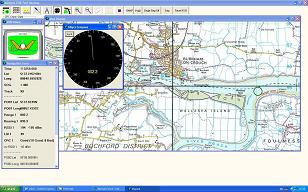
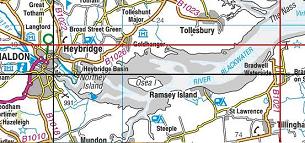
The performance has proved to be outstanding. The picture shows a plot of range trials. The black cross hair shows the position of the base unit at Maldon, the red cross hair shows the position of the unit being tracked, near the beach at Bradwell on Sea. This is a range in excess of 14.7km, and examining the Received Signal Strength Index (RSSI), the system will achieve more. In this trial, the system was limited by geography. What is even more impressive is that this was not direct line of sight, but the signal travelled across another land mass (Heybridge Basin). |
 |
Tests and Trials
Peter and Christine have run a number of land-based and water-based tests and trials with the unit, joined live dive expeditions, and trialled their system for other potential uses. Again, the results have been outstanding. The units have tracked in situations when they really thought they would fail. They also saw the system being used by divers in ways that were not anticipated, that extend its capabilities and make the overall dive trip more efficient. |
 |
The Future
The system has been proved to work better than the best expectations, but as it stands it would be expensive to manufacture. The display box adds considerably to the overall cost and is a extra item in a packed dive boat. The software has been modified so all the diver units network, and any one of them can perform the role of a base unit. The base unit will communicate wirelessly with Apple or Android devices, or in different applications with PCs or Apple Macs to display the current situation. During this rework, the components will be updated to their latest versions. Once this is complete and tested, the next task is to get to a production run, and create the first units for sale. To do this, injection mould tools must be made for the diver unit casing, and the alternative, more convenient, base unit display implemented. Peter and Christine have progressed the project this far by using grants and investing their own money, but the escalating costs mean that they are now actively raising funds for this final phase. From this solid base of a working system, a number of upgrades are planned for the future. These will enhance its flexibility, its usability, and increase its potential for other uses. |